Rotational Motion & Moment of Inertia | Physics for JEE Main & Advanced PDF Download

Rotational Motion
1. Rigid Body
Rigid body is defined as a system of particles in which distance between each pair of particles remains constant (with respect to time) that means the shape and size do not change, during the motion. Eg. Fan, Pen, Table, stone and so on.
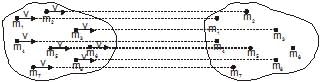
Our body is not a rigid body, two blocks with a spring attached between them is also not a rigid body. For every pair of particles in a rigid body, there is no velocity of seperation or approach between the particles. In the figure shown velocities of A and B with respect to ground are  and
and  respectively
respectively
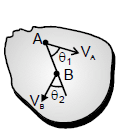
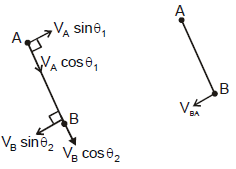
If the above body Is rigid
VA cos θ1 = VB cos θ2
Note : With respect to any particle of rigid body the motion of any other particle of that rigid body is circular.
VBA = relative velocity of B with respect to A.
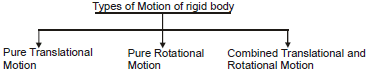
1.1. Pure Translational Motion :
A body is said to be in pure translational motion if the displacement of each particle is same during any time interval however small or large. In this motion all the particles have same  at an instant.
at an instant.
example.
A box is being pushed on a horizontal surface.
 of any particle,
of any particle,  of any particle
of any particle
 of any particle
of any particle
For pure translational motion :-

Where m1, m2, m3, ......... are the masses of different particles of the body having accelerations  respectively.
respectively.
But acceleration of all the particles are same So, 

Where M = Total mass of the body
 = acceleration of any particle or of centre of mass of body
= acceleration of any particle or of centre of mass of body

Where m1, m2, m3 ...... are the masses of different particles of the body having velocities  respectively
respectively
But velocities of all the particles are same so 

Where  = velocity of any particle or of centre of mass of the body.
= velocity of any particle or of centre of mass of the body.
Total Kinetic Energy of body = 
1.2. Pure Rotational Motion :
A body is said to be in pure rotational motion if the perpendicular distance of each particle remains constant from a fixed line or point and do not move parallel to the line, and that line is known as axis of rotation. In this motion all the particles have same  and at an instant. Eg. : - a rotating ceiling fan, arms of a clock.
and at an instant. Eg. : - a rotating ceiling fan, arms of a clock.
For pure rotation motion :-
|
297 videos|953 docs|172 tests
|
FAQs on Rotational Motion & Moment of Inertia - Physics for JEE Main & Advanced
| 1. What is rotational motion and how does it differ from linear motion? |  |
| 2. What is moment of inertia and how is it calculated? | |
| 3. How does the distribution of mass affect the moment of inertia? | |
| 4. What is the relationship between moment of inertia and rotational motion? | |
| 5. How does the moment of inertia affect an object's stability? | |



Extra Questions
,Rotational Motion & Moment of Inertia | Physics for JEE Main & Advanced
,Viva Questions
,Exam
,MCQs
,mock tests for examination
,Semester Notes
,Rotational Motion & Moment of Inertia | Physics for JEE Main & Advanced
,shortcuts and tricks
,practice quizzes
,Previous Year Questions with Solutions
,Objective type Questions
,Rotational Motion & Moment of Inertia | Physics for JEE Main & Advanced
,ppt
,Free
,Summary
,past year papers
,video lectures
,Important questions
,Sample Paper
,study material
;


Rotational Motion & Moment of Inertia Free PDF Download
Importance of Rotational Motion & Moment of Inertia
Rotational Motion & Moment of Inertia Notes
Rotational Motion & Moment of Inertia JEE Questions
Study Rotational Motion & Moment of Inertia on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!