Additional Information about Previous Year Questions- Feedback Characteristics of Control Systems for Electrical Engineering (EE) Preparation
Previous Year Questions- Feedback Characteristics of Control Systems Free PDF Download
The Previous Year Questions- Feedback Characteristics of Control Systems is an invaluable resource that delves deep into the core of the Electrical Engineering (EE) exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Previous Year Questions- Feedback Characteristics of Control Systems now and kickstart your journey towards success in the Electrical Engineering (EE) exam.
Importance of Previous Year Questions- Feedback Characteristics of Control Systems
The importance of Previous Year Questions- Feedback Characteristics of Control Systems cannot be overstated, especially for Electrical Engineering (EE) aspirants.
This document holds the key to success in the Electrical Engineering (EE) exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Previous Year Questions- Feedback Characteristics of Control Systems Notes
Previous Year Questions- Feedback Characteristics of Control Systems Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Previous Year Questions- Feedback Characteristics of Control Systems.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Previous Year Questions- Feedback Characteristics of Control Systems Notes on EduRev are your ultimate resource for success.
Previous Year Questions- Feedback Characteristics of Control Systems Electrical Engineering (EE)
The "Previous Year Questions- Feedback Characteristics of Control Systems Electrical Engineering (EE) Questions" guide is a valuable resource for all aspiring students preparing for the
Electrical Engineering (EE) exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Previous Year Questions- Feedback Characteristics of Control Systems on the App
Students of Electrical Engineering (EE) can study Previous Year Questions- Feedback Characteristics of Control Systems alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Previous Year Questions- Feedback Characteristics of Control Systems,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Previous Year Questions- Feedback Characteristics of Control Systems is prepared as per the latest Electrical Engineering (EE) syllabus.

 (a)
(a) 



 Transfer function
Transfer function 
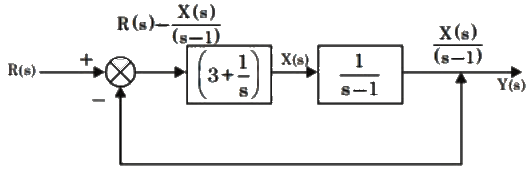 So,
So, 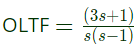
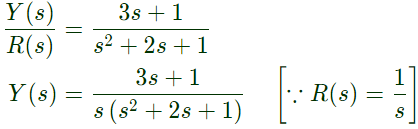 Final value of plant,
Final value of plant, From plant,
From plant,
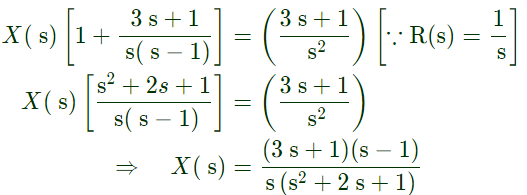 ∴ Final value of controller,
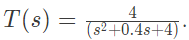
∴ Final value of controller,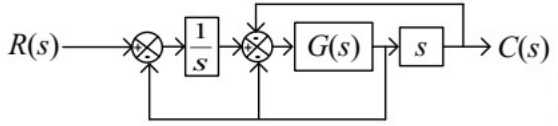 If the desired transfer function of the system is
If the desired transfer function of the system is 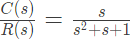 then G(s) is (SET-3 (2014))
then G(s) is (SET-3 (2014))
 The steady state error due to unit step input is _____. (SET-2 (2014))
The steady state error due to unit step input is _____. (SET-2 (2014))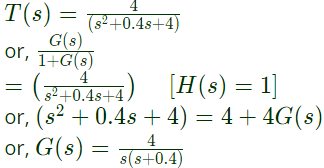 = Open llop transfer function ( for unity feedback system)
= Open llop transfer function ( for unity feedback system)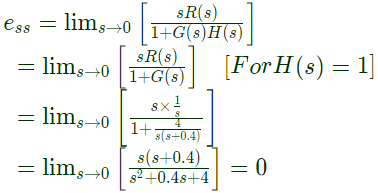 ∴ Steady state error for step input, ess = 0.
∴ Steady state error for step input, ess = 0.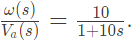 When connected in feedback as shown below, the approximate value of Ka that will reduce the time constant of the closed loop system by one hundred times as compared to that of the open-loop system is (2013)
When connected in feedback as shown below, the approximate value of Ka that will reduce the time constant of the closed loop system by one hundred times as compared to that of the open-loop system is (2013)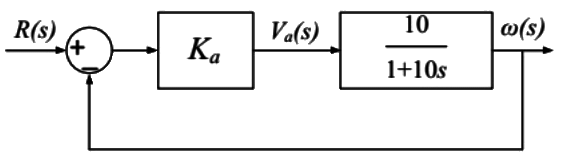 (a) 1
(a) 1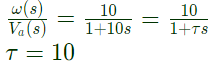 Closed loop systems,
Closed loop systems,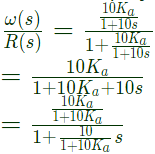 According to quetion,
According to quetion,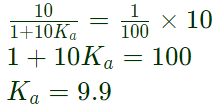
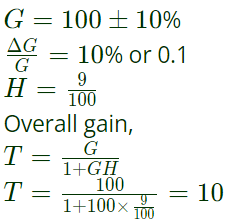
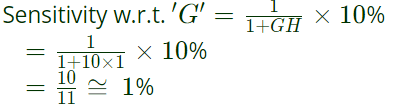
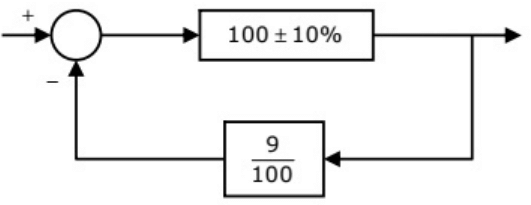 (a) 10 ± 1%
(a) 10 ± 1%