
Best Study Material for Electrical Engineering (EE) Exam
Electrical Engineering (EE) Exam > Electrical Engineering (EE) Notes > Control Systems > Previous Year Questions- Frequency Response Analysis - 1
Previous Year Questions- Frequency Response Analysis - 1 | Control Systems - Electrical Engineering (EE) PDF Download
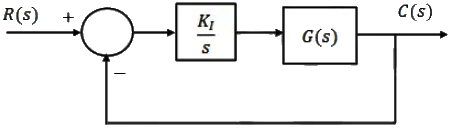
Q1: Consider the stable closed-loop system shown in the figure. The magnitude and phase values of the frequency response of G(s) are given in the table. The value of the gain K1(>0) for a 50° phase margin is (rounded off to 2 decimal places). (2024)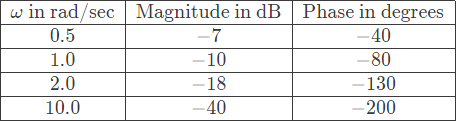
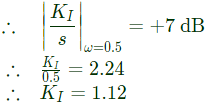
 (a) 1.12
(a) 1.12
(b) 2.25
(c) 1.68
(d) 2.92
Ans: (a)
Sol: 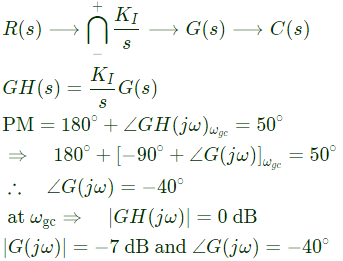
Q2: Consider the stable closed-loop system shown in the figure. The asymptotic Bode magnitude plot of G(s) has a constant slope of −20 dB/ decade at least till 100rad/sec with the gain crossover frequency being 10rad/sec. Hie asymptotic Bode phase plot remains constant at −90° at least till ω = 10rad/sec. The steady-state error of the closed-loop system for a unit ramp input is _____ (rounded off to 2 decimal places). (2024)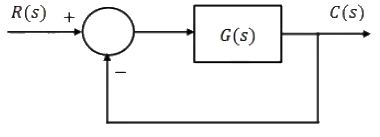 (a) 0.25
(a) 0.25
(b) 0.1
(c) 0.36
(d) 0.42
Ans: (b)
Sol: Initial slppe = −20 dB/sec
Open loop transfer function = k/s
20 log10k = 20
k = 10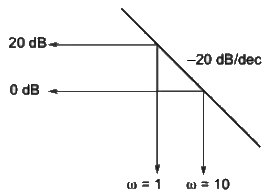 ess for type -1 system for ramp input
ess for type -1 system for ramp input
Q3: Consider a lead compensator of the form The frequency at which this compensator produces maximum phase lead is 4rad/s. At this frequency, the gain amplification provided by the controller, assuming asymptotic Bodemagnitude plot of K( s), is 6 dB. The values of α, β, respectively, are (2023)
The frequency at which this compensator produces maximum phase lead is 4rad/s. At this frequency, the gain amplification provided by the controller, assuming asymptotic Bodemagnitude plot of K( s), is 6 dB. The values of α, β, respectively, are (2023)
(a) 1, 16
(b) 2, 4
(c) 3, 5
(d) 2.66, 2.25
Ans: (b)
Sol: K(s) 
Max. phase lead occur at,  Given : ωm = 4rad/sec
Given : ωm = 4rad/sec Now,
Now,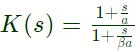
Put, s = jω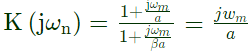 Given : M = 6
Given : M = 6
20 log(4/a) = 6
⇒ a = 2
From eqn. (1), we get
Q4: In the Nyquist plot of the open-loop transfer function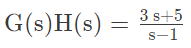 corresponding to the feedback loop shown in the figure, the infinite semi-circular arc of the Nyquist contour in s-plane is mapped into a point at (2023)
corresponding to the feedback loop shown in the figure, the infinite semi-circular arc of the Nyquist contour in s-plane is mapped into a point at (2023)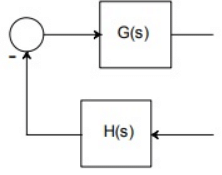 (a) G(s)H(s) = ∞
(a) G(s)H(s) = ∞
(b) G(s)H(s) = 0
(c) G(s)H(s) = 3
(d) G(s)H(s) = −5
Ans: (c)
Sol: Nyquist Contour :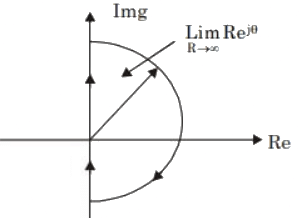 Given:
Given: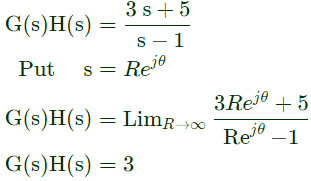
Q5: The open loop transfer function of a unity gain negative feedback system is given as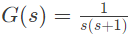 The Nyquist contour in the s-plane encloses the entire right half plane and a small neighbourhood around the origin in the left half plane, as shown in the figure below. The number of encirclements of the point (−1 + j0) by the Nyquist plot of G(s), corresponding to the Nyquist contour, is denoted as N. Then N equals to (2022)
The Nyquist contour in the s-plane encloses the entire right half plane and a small neighbourhood around the origin in the left half plane, as shown in the figure below. The number of encirclements of the point (−1 + j0) by the Nyquist plot of G(s), corresponding to the Nyquist contour, is denoted as N. Then N equals to (2022)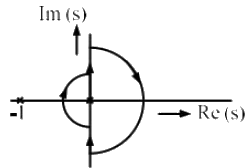 (a) 0
(a) 0
(b) 1
(c) 2
(d) 3
Ans: (b)
Sol: Given: P = 1 (Because, Nyquist contour encircle one pole i.e s = 0)
We have, N = P - Z
N = 1 - Z
Characteristic equation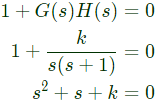 R-H criteria:
R-H criteria: Hence, z = 0 (because no sign change in first column of R-H criteria)
Hence, z = 0 (because no sign change in first column of R-H criteria)
(where, z = closed loop pole on RHS side of s-plane)
Therefore, N = 1.
Q6: An LTI system is shown in the figure where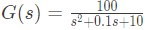 The steady state output of the system, to the input r(t), is given as y(t) = a + b sin(10t + θ). The values of a and b will be (2022)
The steady state output of the system, to the input r(t), is given as y(t) = a + b sin(10t + θ). The values of a and b will be (2022)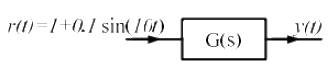 (a) a = 1, b = 10
(a) a = 1, b = 10
(b) a = 10, b = 1
(c) a = 1, b = 100
(d) a = 100, b = 1
Ans: (a)
Sol: 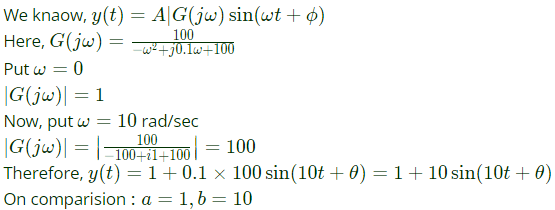
Q7: The Bode magnitude plot of a first order stable system is constant with frequency. The asymptotic value of the high frequency phase, for the system, is −180°. This system has (2022)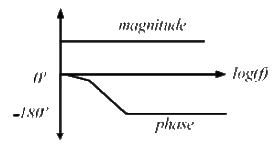 (a) one LHP pole and one RHP zero at the same frequency
(a) one LHP pole and one RHP zero at the same frequency
(b) one LHP pole and one LHP zero at the same frequency
(c) two LHP poles and one RHP zero
(d) two RHP poles and one LHP zero.
Ans: (a)
Sol: The given system is non-minimum phase system Therefore, transfer function, 
Hence, one LHP pole and one RHP zero at the same frequency.
Q8: The Bode magnitude plot for the transfer function  of the circuit is as shown. The value of R is _____________ Ω. (Round off to 2 decimal places.) (2021)
of the circuit is as shown. The value of R is _____________ Ω. (Round off to 2 decimal places.) (2021)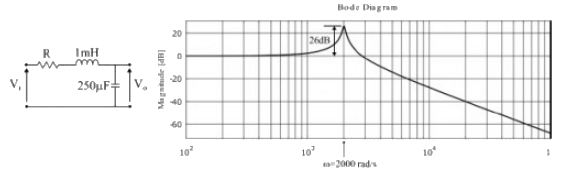 (a) 0.1
(a) 0.1
(b) 0.2
(c) 0.25
(d) 0.05
Ans: (a)
Sol: From response plot
Mr = 26 dB = 20
∴ 
∴ 
From electrical network ∴ R = 0.10Ω
∴ R = 0.10Ω
Q9: A stable real linear time-invariant system with single pole at p, has a transfer function  with a dc gain of 5. The smallest positive frequency, in rad/s at unity gain is closed to: (2020)
with a dc gain of 5. The smallest positive frequency, in rad/s at unity gain is closed to: (2020)
(a) 8.84
(b) 11.08
(c) 78.13
(d) 122.87
Ans: (a)
Sol: 

Q10: Consider a negative unity feedback system with forward path transfer function  where K, a, b, c are positive real numbers. For a Nyquist path enclosing the entire imaginary axis and right half of the s-plane in the clockwise direction, the Nyquist plot of (1 + G(s)), encircles the origin of (1 + G(s))-plane once in the clockwise direction and never passes through this origin for a certain value of K. Then, the number of poles of
where K, a, b, c are positive real numbers. For a Nyquist path enclosing the entire imaginary axis and right half of the s-plane in the clockwise direction, the Nyquist plot of (1 + G(s)), encircles the origin of (1 + G(s))-plane once in the clockwise direction and never passes through this origin for a certain value of K. Then, the number of poles of  lying in the open right half of the s-plane is _________ . (2020)
lying in the open right half of the s-plane is _________ . (2020)
(a) 1
(b) 2
(c) 3
(d) 4
Ans: (b)
Sol: 

Q11: The asymptotic Bode magnitude plot of a minimum phase transfer function G(s) is shown below.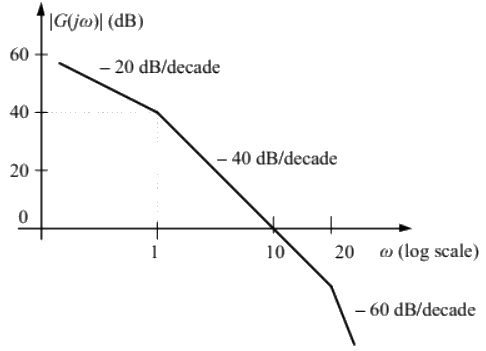 Consider the following two statements.
Consider the following two statements.
Statement I: Transfer function G(s) has three poles and one zero.
Statement II: At very high frequency (ω → ∞), the phase angle ∠G(jω) = −(3π/2).
Which one of the following options is correct? (2019)
(a) Statement I is true and statement II is false.
(b) Statement I is false and statement II is true.
(c) Both the statements are true
(d) Both the statements are false
Ans: (b)
Sol: 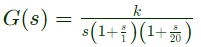
Transfer function shows 2 poles and no zeros. So statement I is false. So statement II is true.
So statement II is true.
Q12: The open loop transfer function of a unity feedback system is given by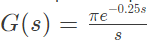 In G(s) plane, the Nyquist plot of G(s) passes through the negative real axis at the point (2019)
In G(s) plane, the Nyquist plot of G(s) passes through the negative real axis at the point (2019)
(a) (-0.5, j0)
(b) (-0.75, j0)
(c) (-1.25, j0)
(d) (-1.5, j0)
Ans: (a)
Sol: 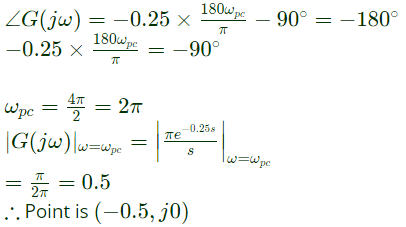
Q13: Consider the unity feedback control system shown. The value of K that results in a phase margin of the system to be 30° is _______. (SET-1(2017))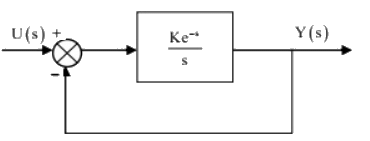 (a) 0.5
(a) 0.5
(b) 1.04
(c) 2.09
(d) 4.029
Ans: (b)
Sol: Forward path transfer function, 
Given,
Phase margin = 30°
Phase margin = 180° + ϕ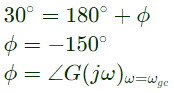 [where ωgc is gain crossover frequency]
[where ωgc is gain crossover frequency]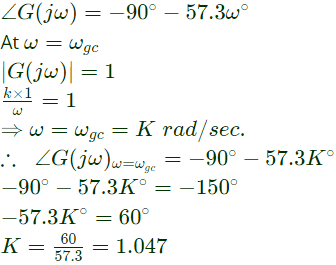
Q14: The transfer function of a system is given by 
Let the output of the system be vo(t) = Vmsin(ωt + φ) for the input vi(t) = Vmsin(ωt).
Then the minimum and maximum values of φ (in radians) are respectively (SET-1 (2017))
(a) 
(b) 
(c) 0 and π/2
(d) −π and 0
Ans: (d)
Sol:  For the minimum and maximum values of ′ϕ′
For the minimum and maximum values of ′ϕ′
Q15: Loop transfer function of a feedback system is G(s)H(s) = ((s+3)/(s2(s−3))). Take the Nyquist contour in the clockwise direction. Then, the Nyquist plot of G(s)H(s) encircles -1 + j0 (SET-1 (2016))
(a) once in clockwise direction
(b) twice in clockwise direction
(c) once in anticlockwise direction
(d) twice in anticlockwise direction
Ans: (a)
Sol: Nyquist plot of G(s)H(s) =  is as shown below
is as shown below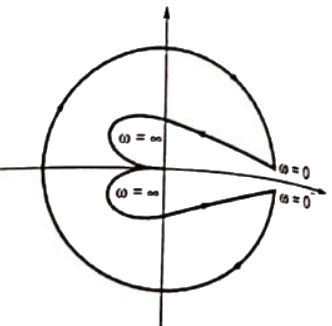 From the Nyquist plot G(s)H(s) encircle -1 + j0 once in clockwise direction.
From the Nyquist plot G(s)H(s) encircle -1 + j0 once in clockwise direction.
Alternate Solution:
Characteristic equation,
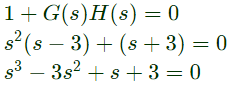 using Routh's array
using Routh's array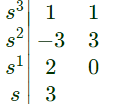 There are two sign changes, hence two poles in right side of s-plane exist.
There are two sign changes, hence two poles in right side of s-plane exist.
Z = 2, P = 1
N = P − Z = −1
One encirclement in clockwise direction.
Q16: Consider the following asymptotic Bode magnitude plot (ω is in rad/s).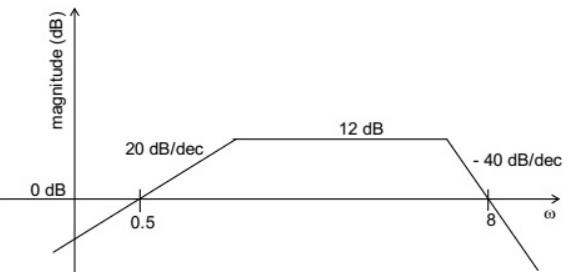 Which one of the following transfer functions is best represented by the above Bode magnitude plot? (SET-1(2016))
Which one of the following transfer functions is best represented by the above Bode magnitude plot? (SET-1(2016))
(a) 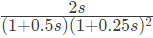
(b) 
(c) 
(d) 
Ans: (a)
Sol: From the given Bode plot, it is evident that there are 3(three) poles in the transfer function, out of which there are double poles at corner frequency near but less than ω = 8 rad/sec and one pole is near but greater than ω = 0.5 rad/sec. The initial slope is +20 dB/dec. Therefore one zero exist at s = 0. So from all the given options, option (A) satisfies all the conditions. Therefore Option (A) is correct.
Q17: The phase cross-over frequency of the transfer function G(s) = 100/(s+3)3 in rad/s is (SET-1(2016))
(a) √3
(b) 1/√3
(c) 3
(d) 3√3
Ans: (a)
Sol: 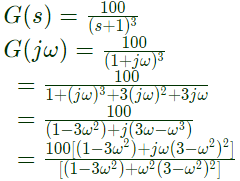 For phase corssover frequency ωphImg[G(jω)] = 0;
For phase corssover frequency ωphImg[G(jω)] = 0;
Hence, ω(3 − ω2) = 0
ω = 0; ± √3
Therefore, ωph = √3 rad/sec
Q18: Nyquist plots of two functions G1(s) and G2(s) are shown in figure.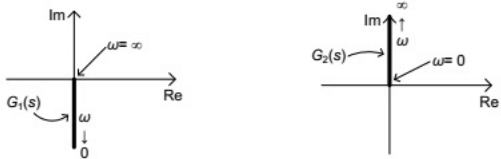 Nyquist plot of the product of G1(s) and G2(s) is (SET-2(2015))
Nyquist plot of the product of G1(s) and G2(s) is (SET-2(2015))
(a) 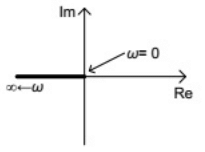 (b)
(b) 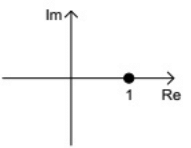 (c)
(c)  (d)
(d) 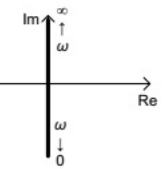 Ans: (b)
Ans: (b)
Sol: 
Q19: A Bode magnitude plot for the transfer function G(s) of a plant is shown in the figure. Which one of the following transfer functions best describes the plant? (SET-1(2015))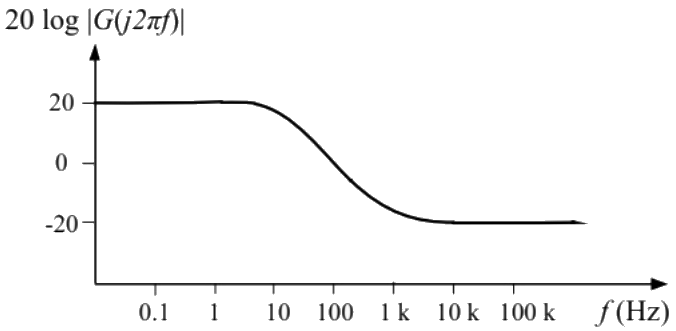 (a)
(a) 
(b) 
(c) 
(d) 
Ans: (d)
Sol: From initial line equation,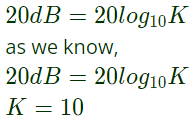 now, from the given plot we know type of system is one.
now, from the given plot we know type of system is one.
Hence, 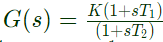
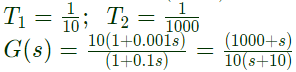
Q20: The magnitude Bode plot of a network is shown in the figure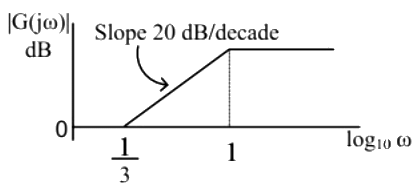 The maximum phase angle ϕm and the corresponding gain Gm respectively, are (SET-3(2014))
The maximum phase angle ϕm and the corresponding gain Gm respectively, are (SET-3(2014))
(a) −30° and 1.73 dB
(b) −30° and 4.77 dB
(c) +30° and 4.77 dB
(d) +30° and 1.73 dB
Ans: (c)
Sol: From the given Bode plot, it is clear that corner frequencies, ∴ Transfer function of given system is given by
∴ Transfer function of given system is given by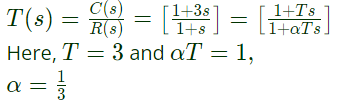 As α < 1, therefore the transfer function T(s) represents a lead compensator having α = 1/3
As α < 1, therefore the transfer function T(s) represents a lead compensator having α = 1/3
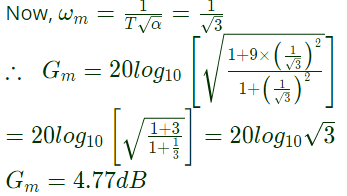
∴ Maximum phase shift,
The document Previous Year Questions- Frequency Response Analysis - 1 | Control Systems - Electrical Engineering (EE) is a part of the Electrical Engineering (EE) Course Control Systems.
All you need of Electrical Engineering (EE) at this link: Electrical Engineering (EE)
|
54 videos|83 docs|40 tests
|

FAQs on Previous Year Questions- Frequency Response Analysis - 1 - Control Systems - Electrical Engineering (EE)
| 1. What is frequency response analysis in control systems? |  |
| 2. How do you determine the frequency response of a system? | |
Ans.To determine the frequency response of a system, one can use methods such as Bode plots, Nyquist plots, or frequency response functions. These methods involve applying sinusoidal inputs of varying frequencies to the system and measuring the corresponding output, which is then analyzed to visualize the gain and phase shift over the frequency range.
| 3. What is the significance of Bode plots in frequency response analysis? | |
Ans.Bode plots are significant in frequency response analysis as they provide a graphical representation of a system's gain and phase shift across a range of frequencies. They help engineers quickly assess stability margins, gain crossover frequency, and phase crossover frequency, which are crucial for designing and tuning control systems.
| 4. What are the common types of systems analyzed using frequency response? | |
Ans.Common types of systems analyzed using frequency response include linear time-invariant (LTI) systems, electrical circuits, mechanical systems, and digital control systems. These systems can be modeled and analyzed to determine their dynamic behavior and performance under various input conditions.
| 5. How does frequency response analysis aid in system design and stability? | |
Ans.Frequency response analysis aids in system design and stability by allowing engineers to identify potential stability issues and design compensators to improve performance. By understanding how a system reacts to different frequencies, engineers can make informed decisions on controller design, bandwidth limitations, and enhance the overall robustness of the system.
About this Document

4.68/5
Rating

Apr 17, 2025
Last updated
Document Description: Previous Year Questions- Frequency Response Analysis - 1 for Electrical Engineering (EE) 2025 is part of Control Systems preparation.
The notes and questions for Previous Year Questions- Frequency Response Analysis - 1 have been prepared according to the Electrical Engineering (EE) exam syllabus. Information about Previous Year Questions- Frequency Response Analysis - 1 covers topics
like and Previous Year Questions- Frequency Response Analysis - 1 Example, for Electrical Engineering (EE) 2025 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Previous Year Questions- Frequency Response Analysis - 1.
Introduction of Previous Year Questions- Frequency Response Analysis - 1 in English is available as part of our Control Systems
for Electrical Engineering (EE) & Previous Year Questions- Frequency Response Analysis - 1 in Hindi for Control Systems course.
Download more important topics related with notes, lectures and mock test series for Electrical Engineering (EE)
Exam by signing up for free. Electrical Engineering (EE): Previous Year Questions- Frequency Response Analysis - 1 | Control Systems - Electrical Engineering (EE)
Description
Full syllabus notes, lecture & questions for Previous Year Questions- Frequency Response Analysis - 1 | Control Systems - Electrical Engineering (EE) - Electrical Engineering (EE) | Plus excerises question with solution to help you revise complete syllabus for Control Systems | Best notes, free PDF download
Information about Previous Year Questions- Frequency Response Analysis - 1
In this doc you can find the meaning of Previous Year Questions- Frequency Response Analysis - 1 defined & explained in the simplest way possible. Besides explaining types of
Previous Year Questions- Frequency Response Analysis - 1 theory, EduRev gives you an ample number of questions to practice Previous Year Questions- Frequency Response Analysis - 1 tests, examples and also practice Electrical Engineering (EE)
tests

Related Searches
Previous Year Questions with Solutions
,Previous Year Questions- Frequency Response Analysis - 1 | Control Systems - Electrical Engineering (EE)
,Sample Paper
,Viva Questions
,past year papers
,Objective type Questions
,Exam
,practice quizzes
,Previous Year Questions- Frequency Response Analysis - 1 | Control Systems - Electrical Engineering (EE)
,study material
,shortcuts and tricks
,mock tests for examination
,Free
,Previous Year Questions- Frequency Response Analysis - 1 | Control Systems - Electrical Engineering (EE)
,Extra Questions
,Important questions
,video lectures
,ppt
,Semester Notes
,MCQs
,Summary
;


Additional Information about Previous Year Questions- Frequency Response Analysis - 1 for Electrical Engineering (EE) Preparation
Previous Year Questions- Frequency Response Analysis - 1 Free PDF Download
The Previous Year Questions- Frequency Response Analysis - 1 is an invaluable resource that delves deep into the core of the Electrical Engineering (EE) exam.
These study notes are curated by experts and cover all the essential topics and concepts, making your preparation more efficient and effective.
With the help of these notes, you can grasp complex subjects quickly, revise important points easily,
and reinforce your understanding of key concepts. The study notes are presented in a concise and easy-to-understand manner,
allowing you to optimize your learning process. Whether you're looking for best-recommended books, sample papers, study material,
or toppers' notes, this PDF has got you covered. Download the Previous Year Questions- Frequency Response Analysis - 1 now and kickstart your journey towards success in the Electrical Engineering (EE) exam.
Importance of Previous Year Questions- Frequency Response Analysis - 1
The importance of Previous Year Questions- Frequency Response Analysis - 1 cannot be overstated, especially for Electrical Engineering (EE) aspirants.
This document holds the key to success in the Electrical Engineering (EE) exam.
It offers a detailed understanding of the concept, providing invaluable insights into the topic.
By knowing the concepts well in advance, students can plan their preparation effectively.
Utilize this indispensable guide for a well-rounded preparation and achieve your desired results.
Previous Year Questions- Frequency Response Analysis - 1 Notes
Previous Year Questions- Frequency Response Analysis - 1 Notes offer in-depth insights into the specific topic to help you master it with ease.
This comprehensive document covers all aspects related to Previous Year Questions- Frequency Response Analysis - 1.
It includes detailed information about the exam syllabus, recommended books, and study materials for a well-rounded preparation.
Practice papers and question papers enable you to assess your progress effectively.
Additionally, the paper analysis provides valuable tips for tackling the exam strategically.
Access to Toppers' notes gives you an edge in understanding complex concepts.
Whether you're a beginner or aiming for advanced proficiency, Previous Year Questions- Frequency Response Analysis - 1 Notes on EduRev are your ultimate resource for success.
Previous Year Questions- Frequency Response Analysis - 1 Electrical Engineering (EE)
The "Previous Year Questions- Frequency Response Analysis - 1 Electrical Engineering (EE) Questions" guide is a valuable resource for all aspiring students preparing for the
Electrical Engineering (EE) exam. It focuses on providing a wide range of practice questions to help students gauge
their understanding of the exam topics. These questions cover the entire syllabus, ensuring comprehensive preparation.
The guide includes previous years' question papers for students to familiarize themselves with the exam's format and difficulty level.
Additionally, it offers subject-specific question banks, allowing students to focus on weak areas and improve their performance.
Study Previous Year Questions- Frequency Response Analysis - 1 on the App
Students of Electrical Engineering (EE) can study Previous Year Questions- Frequency Response Analysis - 1 alongwith tests & analysis from the EduRev app,
which will help them while preparing for their exam. Apart from the Previous Year Questions- Frequency Response Analysis - 1,
students can also utilize the EduRev App for other study materials such as previous year question papers, syllabus, important questions, etc.
The EduRev App will make your learning easier as you can access it from anywhere you want.
The content of Previous Year Questions- Frequency Response Analysis - 1 is prepared as per the latest Electrical Engineering (EE) syllabus.
|
© EduRev
|
Education Revolution
|



|






Signup on EduRev and stay on top of your study goals
10M+ students crushing their study goals daily